ROS Basics in 5 days (C++) 4.4 Topics Quiz Not subscribed to
Descrição
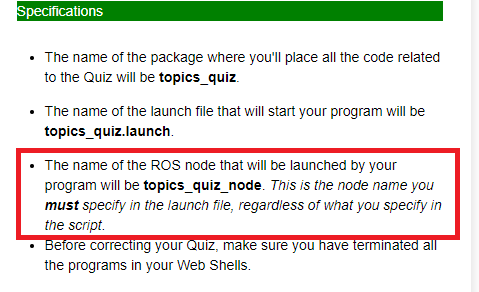
I don’t understand what I am doing wrong. The robot avoids an obstacle. The node name is correct (“topics_quiz_node”). No other programs are running. #include <ros/ros.h> #include <geometry_msgs/Twist.h> #include <sensor_msgs/LaserScan.h> float angVel = 0; void laserCallback(const sensor_msgs::LaserScan::ConstPtr& laserScan) { angVel = 0.0; ROS_INFO("Forward: %f", laserScan->ranges[360]); ROS_INFO("Left: %f", laserScan->ranges[719]); ROS_INFO("Right: %f", laserScan->ranges[719]);

PDF) A ROS-Based Open Tool for Intelligent Robotics Education

Quiz - unit 4 - c++ - ROS Basics In 5 Days (C++) - The Construct ROS Community
10 FREE COURSES FROM UDEMY FOR SELF IMPROVEMENT, Gallery posted by lemonordurian

Raspberry Pi HiFi DAC Pro Hat ES9038Q2M Audio Card PCM DSD Lossless High Resolution Digital-to-Analog Converter Adapter for Raspberry Pi 4 3B+ 3B Zero w Zero : Electronics

Intelligent Robot: Implementation and Applications 981198252X, 9789811982521
Sustainability, Free Full-Text
ROS Basics in 5 days (C++) 4.4 Topics Quiz Not subscribed to /kobuki/laser/scan - ROS Basics In 5 Days (C++) - The Construct ROS Community

Inside the IBM RISC System/ PDF Free Download
Is it okay to learn C++ in the 4th semester? - Quora

OMNeT++ - Simulation Manual

Action quiz - goal not using custom msg - ROS Basics In 5 Days (C++) - The Construct ROS Community

ROS BASICS IN 5 DAYS #7 - ROS Services
Main Page
de
por adulto (o preço varia de acordo com o tamanho do grupo)