Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Descrição

What are manipulator robots? Understanding their Design, Types, and Applications
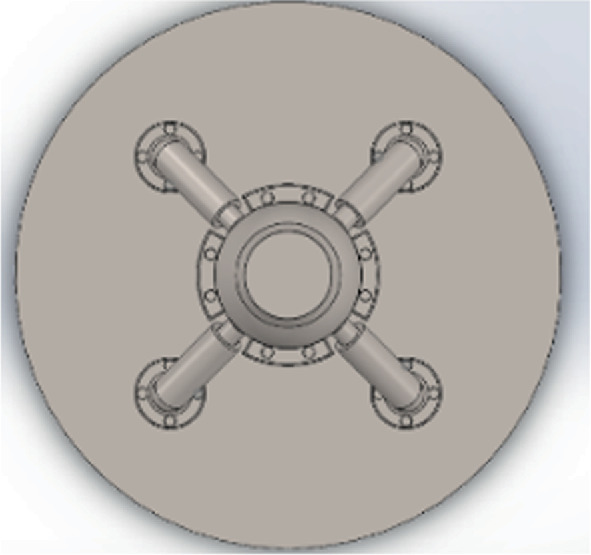
Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators

Workspace characterization and kinematic analysis of general spherical parallel manipulators revisited via graphical based approaches - ScienceDirect
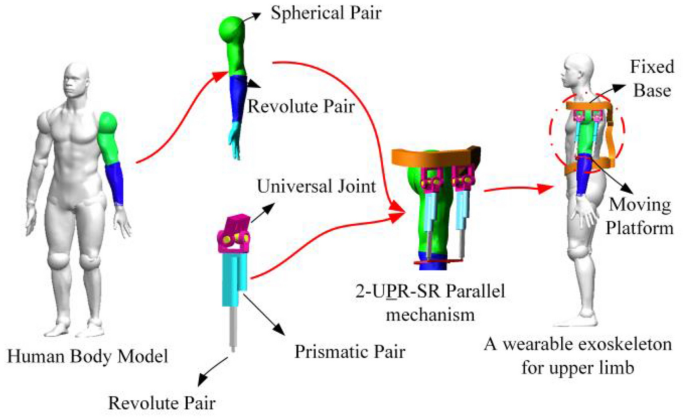
Design and Analysis of a Novel Shoulder Exoskeleton Based on a Parallel Mechanism, Chinese Journal of Mechanical Engineering
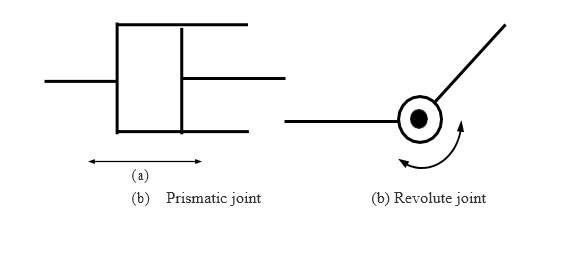
Figure 5. 1 Primitive joint types: (a) a prismatic joint and (b) a revolute joint

The inverse kinematics of a 7R 6-degree-of-freedom robot with non-spherical wrist - Xuhao Wang, Dawei Zhang, Chen Zhao, 2017

Design of a robotic manipulator for handling products of automotive industry - Miroslav Blatnický, Ján Dižo, Juraj Gerlici, Milan Sága, Tomáš Lack, Erik Kuba, 2020
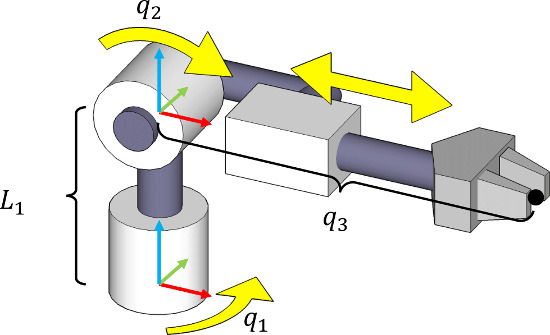
Kinematics

Design and analysis of a tendon-driven snake-arm robot based on a spherical magnets

Figure 5 from Concept of a three D.O.F spherical-joint gripper for industrial robots
Geometry and kinematics for a spherical-base integrated parallel mechanism – topic of research paper in Mechanical engineering. Download scholarly article PDF and read for free on CyberLeninka open science hub.

A Light Space Manipulator with High Load-to-Weight Ratio: System Development and Compliance Control

Kinematics Analysis of 6-DoF Articulated Robot with Spherical Wrist
de
por adulto (o preço varia de acordo com o tamanho do grupo)